I ran into some issues with my unraid server recently. The docker image usage started skyrocketing at an alarming rate. I started digging into multiple ways it could be getting filled up and ran into a very odd file while doing so (sadly it didn’t contribute to the docker image usage, but good to have it removed anyway). I ran into a 20GB log file being generated by docker.
Continue reading “Docker Log File Usage”Exporting Gifs using VSDC

I made a cyberbrick model and posted it to makerworld, but while telling folks about it, someone mentioned that it would be nice to have a video of it driving to reference when deciding if they wanted to make it. I could record one easily enough on my phone, but I haven’t tried to convert it to a GIF before for use on the various 3d printing websites. I do have VSDC though, so lets use that!
Continue reading “Exporting Gifs using VSDC”Bot 2: Pinch Hazard
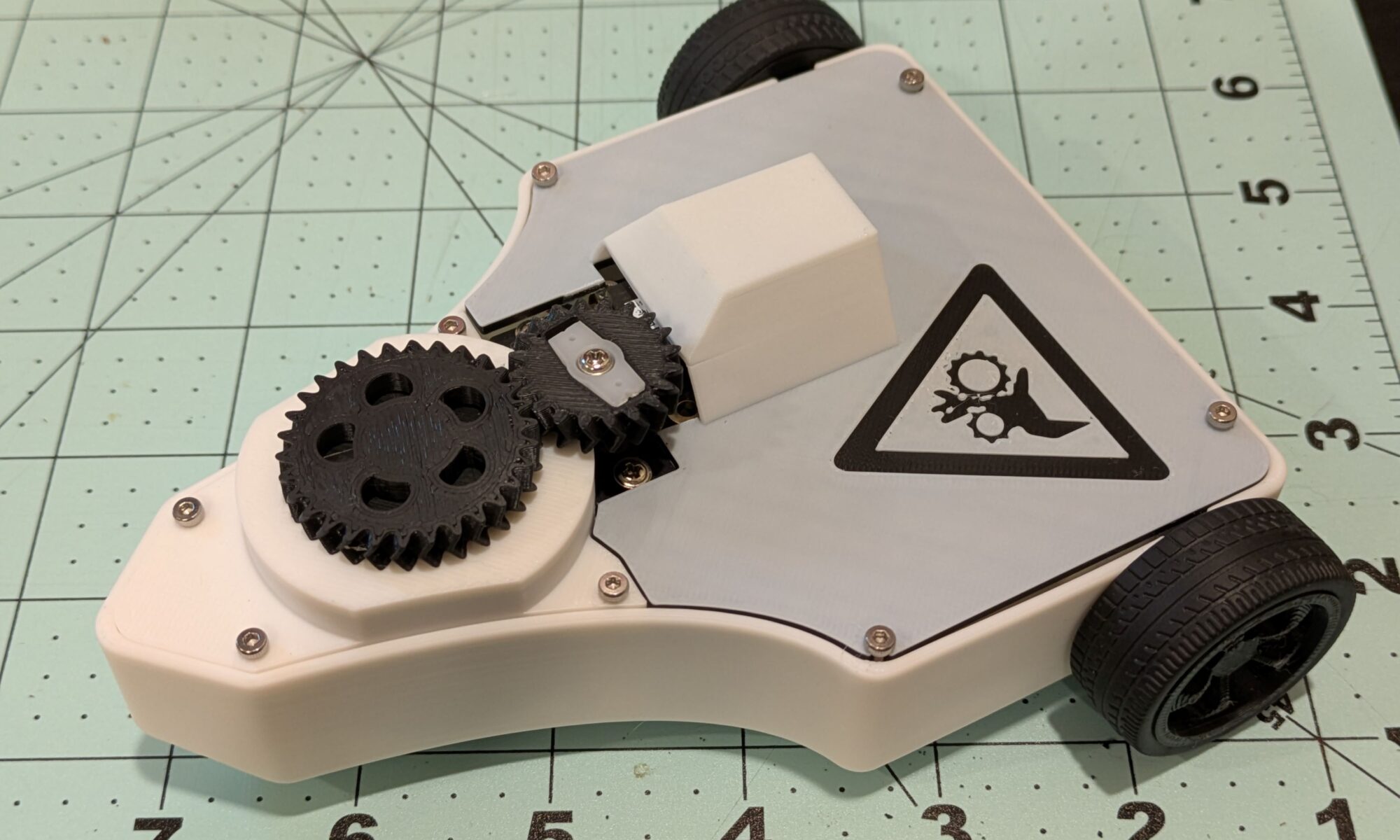
After making This Side Up, I have wanted to make another bot, this time a bit more controllable. I picked motors that were too high of RPM and an ESC without too little finesse to drive it around well. I also felt like trying out the cyberbrick kit from Bambu Labs. So here I am designing a sibling bot using the brick.
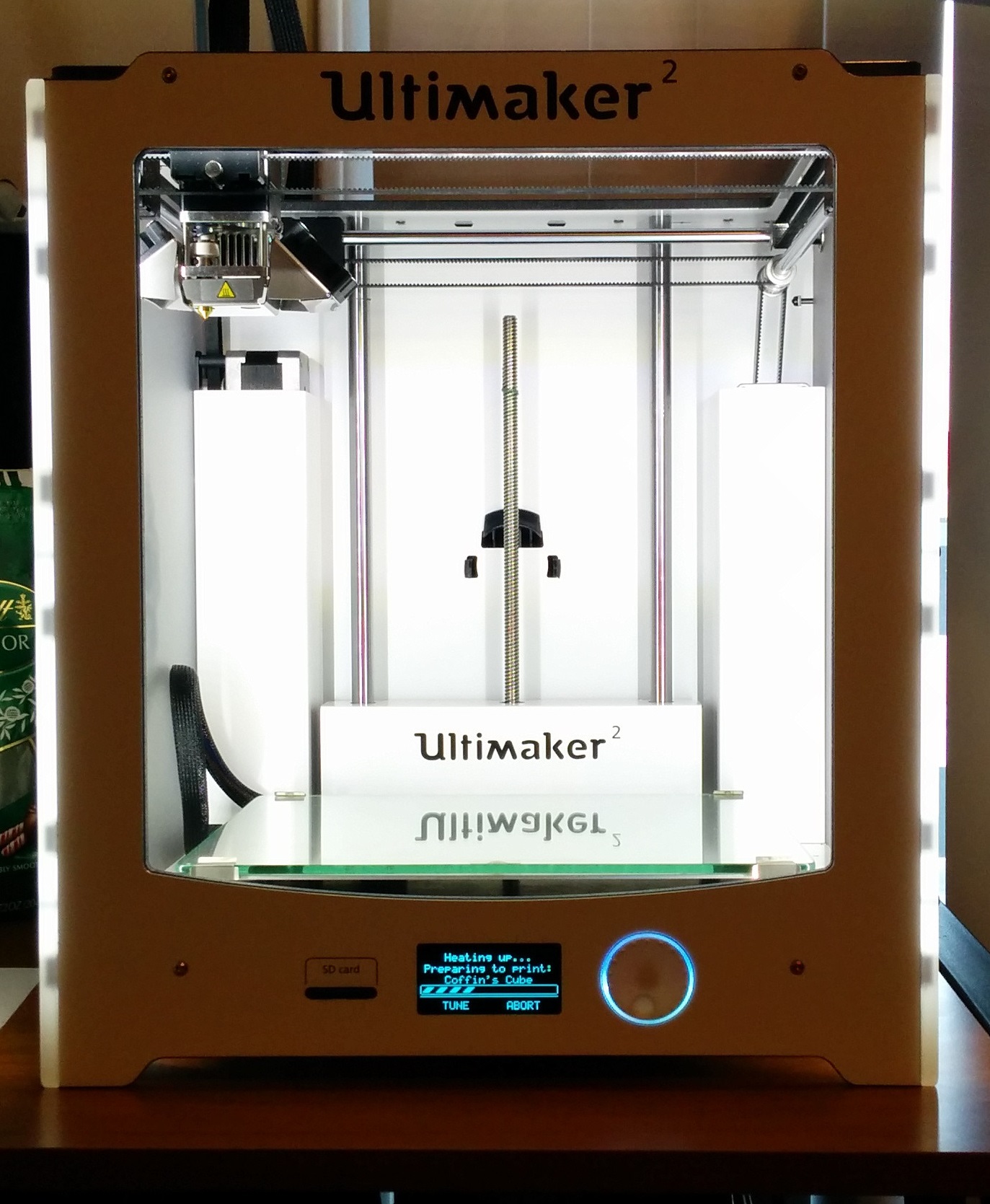
Continue reading “Bot 2: Pinch Hazard”3d Printing in the Smart Home








Just trying a new thing here I guess, just a gallery of projects, linking out to the blog posts covering them. Not sure if I’ll do this often, probably not though.
DokuWiki Android App
I recently setup the dokuwiki Android app on my phone. The setup was simple enough with one catch. The server URL had to be the URL to the xmlrpc.php file on the server. This couldn’t be just the wiki domain to function. I’m not sure if I missed the note in the setup docs, but felt like ensuring it’s included here for reference.

Roku Integration ECP Command Not Allowed
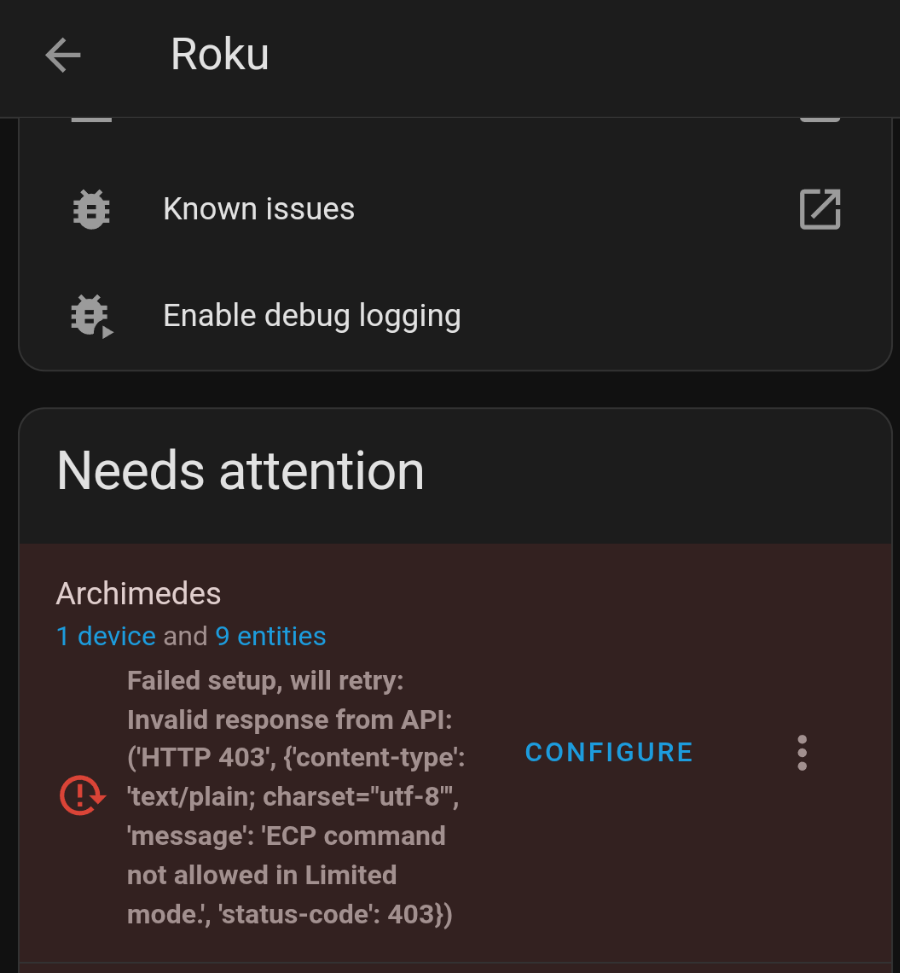
I noticed that my roku integrations in home assistant weren’t functioning. They were instead throwing an error that “ECP command not allowed in Limited mode”. Luckily this is a pretty easy thing to fix in Roku settings.
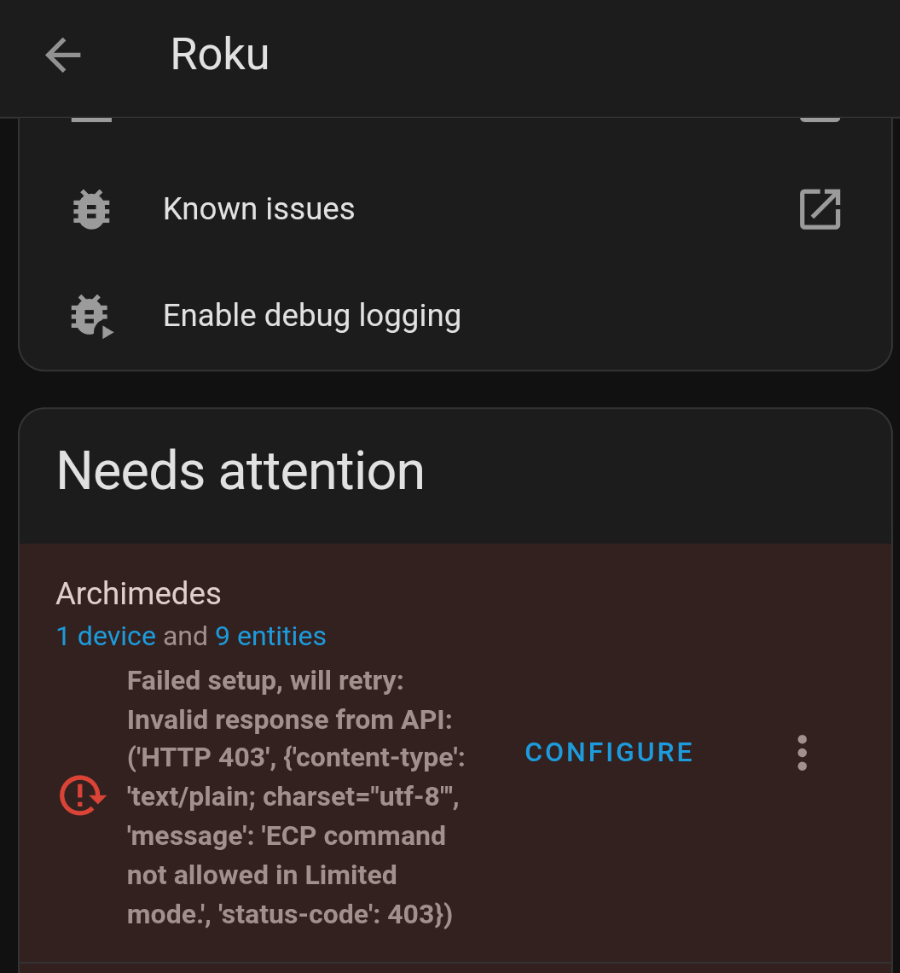
Additional options were added to Settings > System > Advanced System Settings > Control by mobile apps > Network access. This is now defaulted to “Limited mode” which disables the access the integration needs. Putting this setting into “Permissive” or “Enabled” will fix the issue.
Resources:
Finishing Old Projects 3 – Dishonored (Corvo’s) Mask
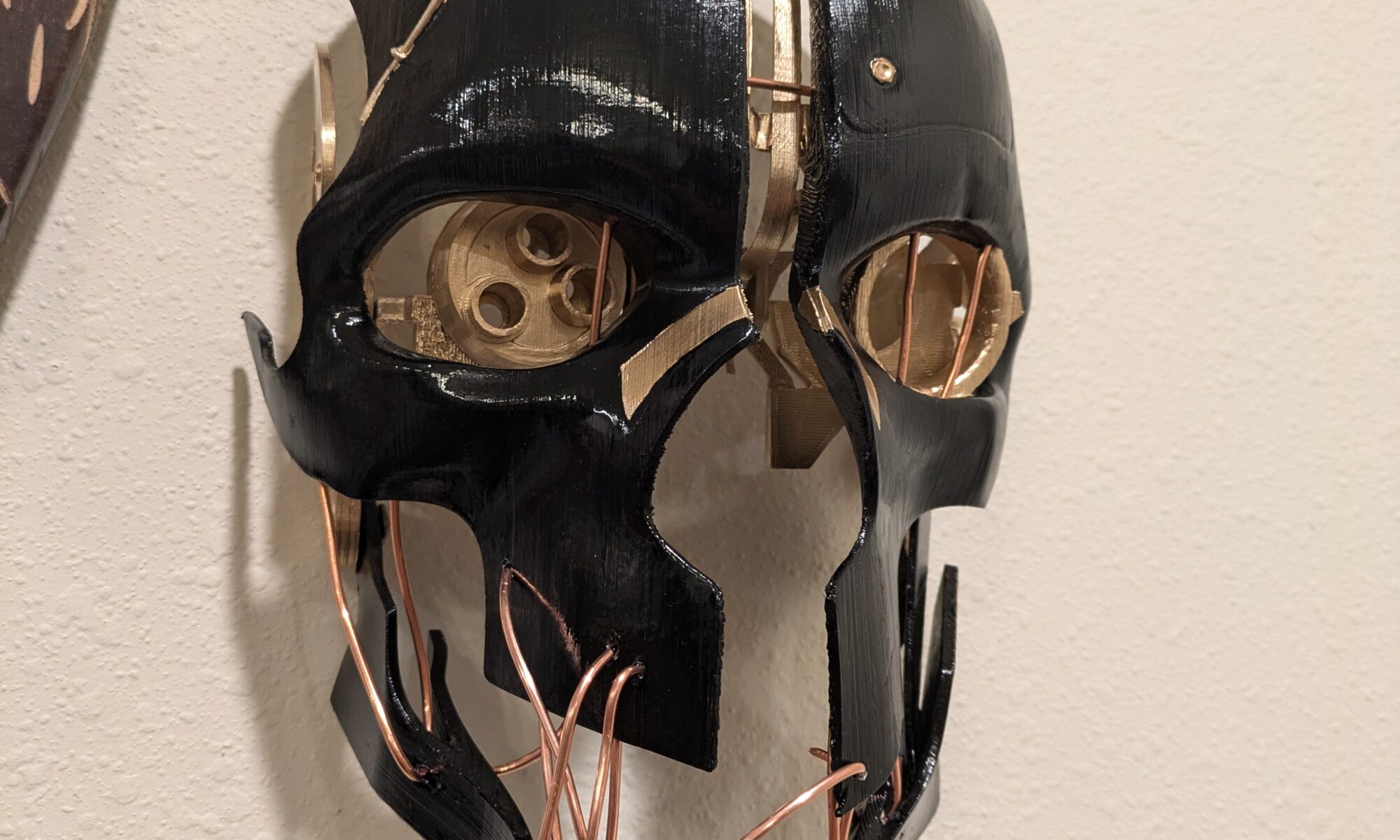
This is another project I started quite a few years ago. I printed out a number of the small parts for the mask, though never got to the larger parts of the print, and still had plenty left to do on it. I didn’t intend to make it wearable, so that will at least simplify some of the construction.
Continue reading “Finishing Old Projects 3 – Dishonored (Corvo’s) Mask”ESPHome Powered Solder Fume Filtration/Extraction

As I’ve been doing more soldering and creating air quality sensors, I’ve noticed an extreme drop in quality when I’m soldering. This doesn’t surprise me, but seeing the magnitude of it gives me good reason to work on a small soldering fume extractor and filter.
Continue reading “ESPHome Powered Solder Fume Filtration/Extraction”Renaming Hostnames in ESPHome
I’ve been a bit annoyed by the default esphome-web names that many of my devices have. I haven’t tried renaming many of them, which seems to be simpler now than when I first renamed a few of them years ago. I also have a secondary issue in my ESPHome dashboard, devices showing as offline, but that are online in Home Assistant.
Continue reading “Renaming Hostnames in ESPHome”Tertiary Parts of an NFC Music Player

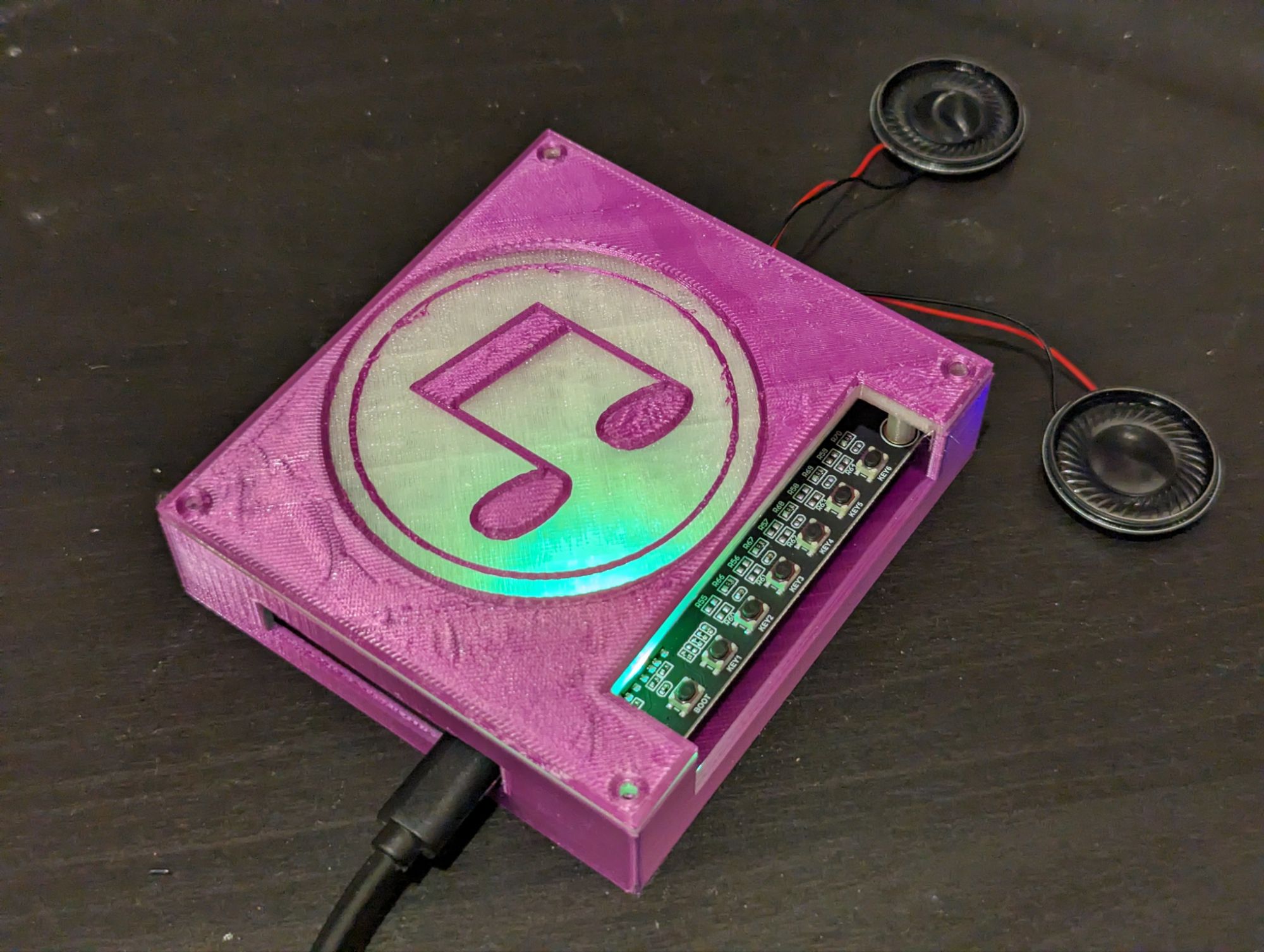
The devil is always in the details with large systems like this. I wanted my multi room audio system to feel like a polished product, a professional setup. For that I need to make sure I covered ALL the details, since it’s all the small things that can add up to big issues. Here is a smattering of the details I’ve been working on for my multi room audio system.
Continue reading “Tertiary Parts of an NFC Music Player”