After making This Side Up, I have wanted to make another bot, this time a bit more controllable. I picked motors that were too high of RPM and an ESC without too little finesse to drive it around well. I also felt like trying out the cyberbrick kit from Bambu Labs. So here I am designing a sibling bot using the brick.
I looked around at first to try and find some similar designs I could remix and make use of. I did find some parts I could link to but not always include in my final parts file sets using the maker world exclusive license. It doesn’t let me remix and post to other sites, but nothing says I can’t link to the maker world model as part of my bill of materials from those other sites, and keep the rest of the design for my bot to my own models.
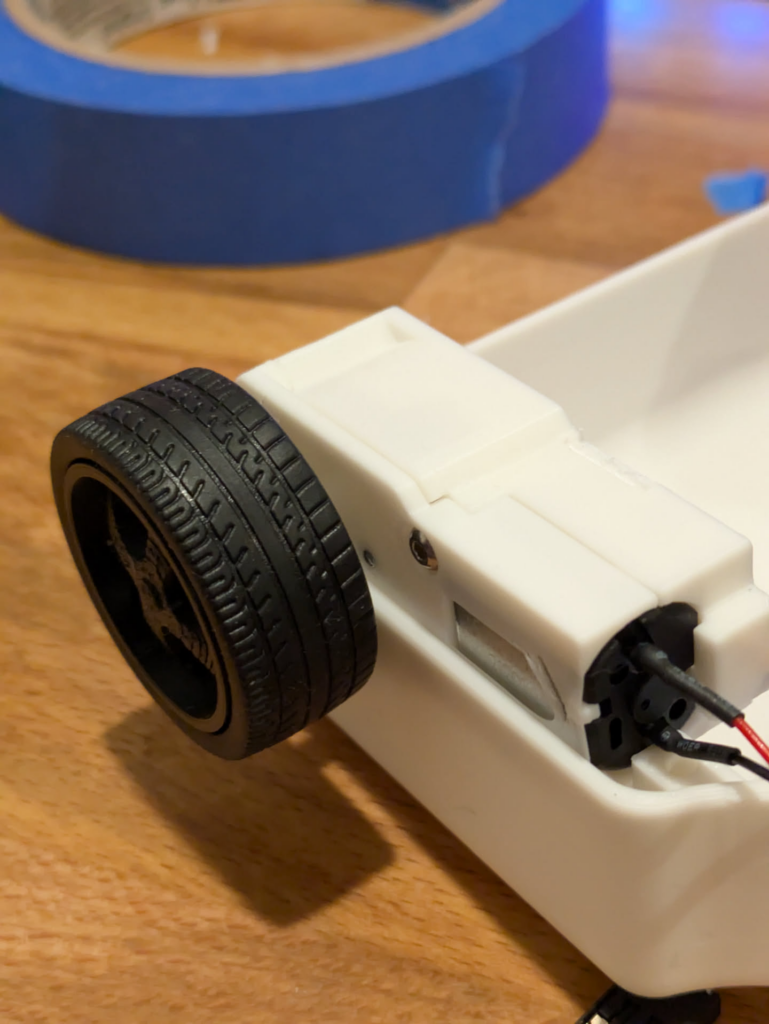
Redesigning the Wheel
All the cyber brick related models I ran into on my searches ended up being standard digital file licenses (no remix, no share) and I didn’t really like that. So here I am redesigning the wheel to get some remixable sources out there (also to allow me to include the pieces in my own model rather than having to link out to something that could disappear if the original designer pulled it).
I like messing with wheel hub designs, they’re nice, symmetric, and pretty quick to whip up after we have the wheel itself modeled. So I started with a baseline flat wheel design that fit the cyber brick tire and motor shafts and started working on the hubs and fancy looking stuff after that.


I tested out my boring wheel to start with, I wanted to make sure it fit the tire and motor shaft before going any further, after that I started modeling up some cool looking and shaped hubs to make things a bit more interesting.
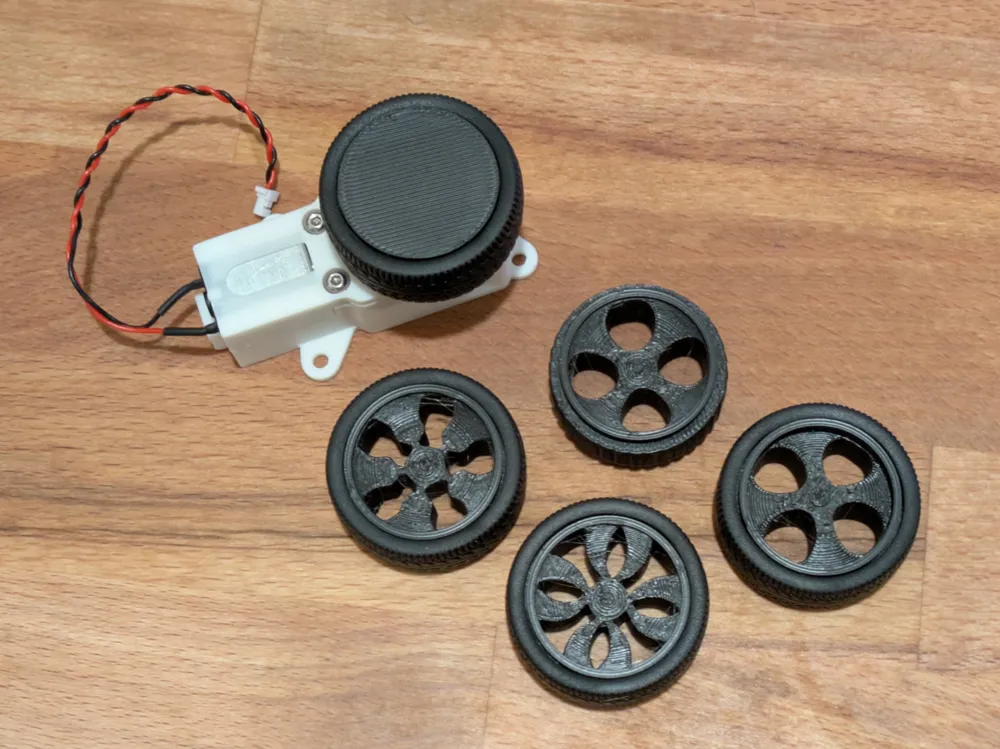
My wheel models are available on maker world, printables, and thingiverse.
Controls
I wanted to have proper steering in this design, and have spotted some good looking mechanisms I can base my models off of. I want to keep my final design to a similar plan to my bot “This side up”, so I’m going with a single front wheel with steering and two rear wheels for power.
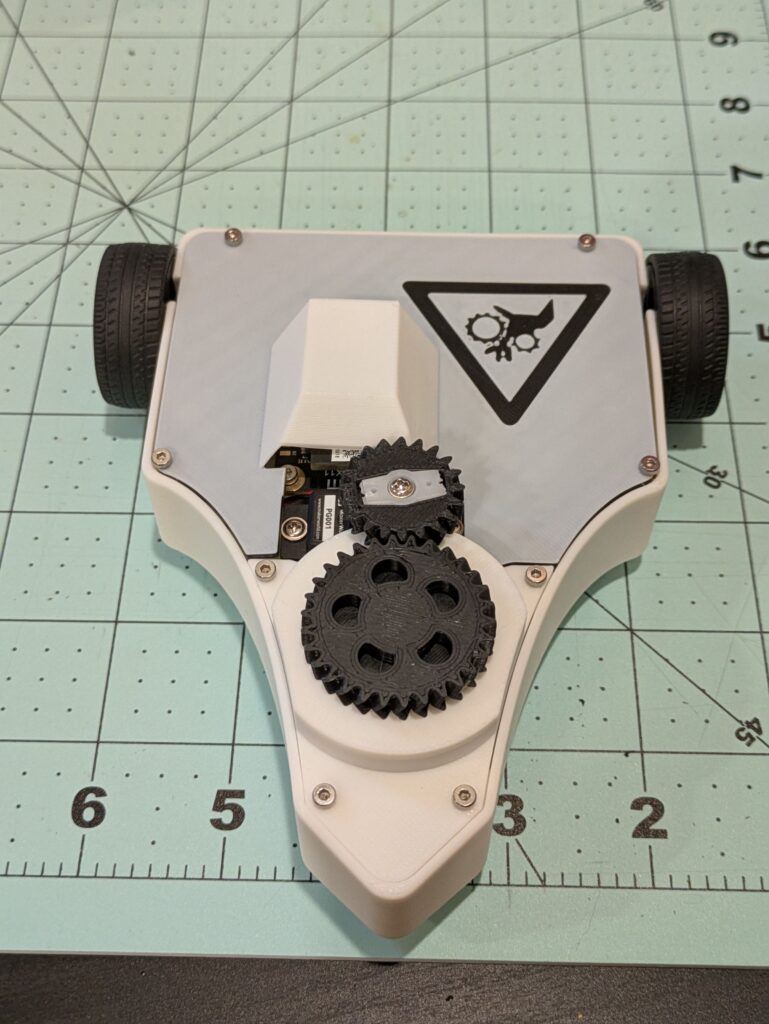
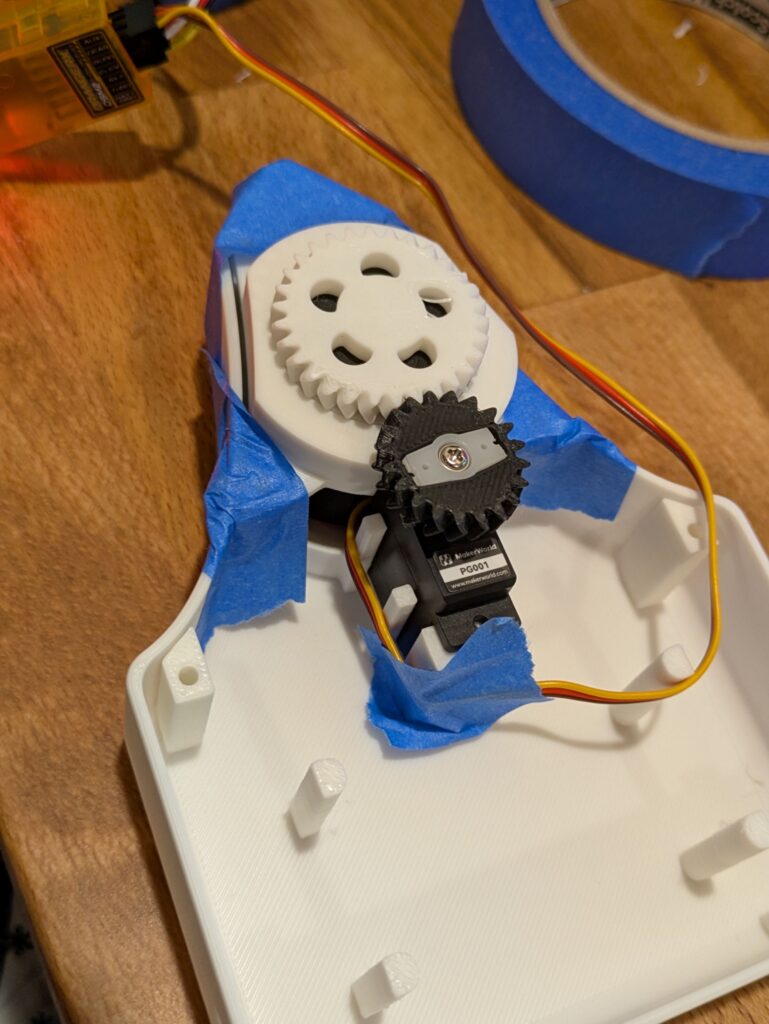
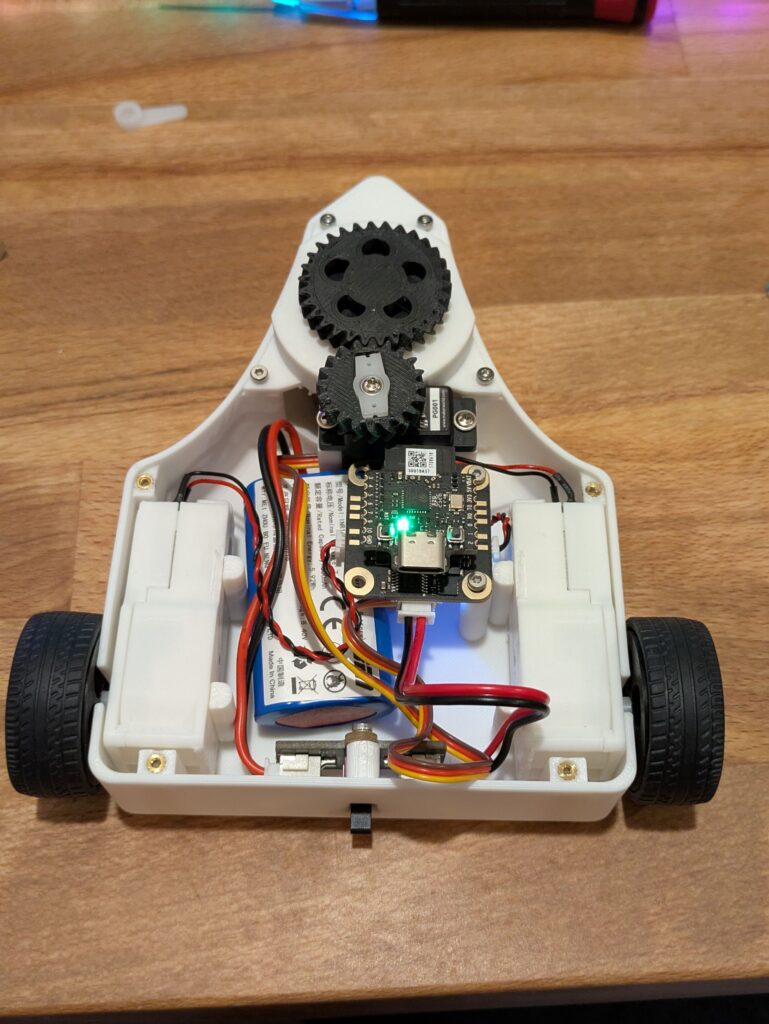
For the steering mechanism, I’m going to use a gear mounted to a servo to drive a larger gear that turns the front wheel. This will let us get a bit more torque on the front wheel and will hopefully keep the servo from being damaged in the process. The wheel will also be underneath the robot and protected from direct impact damage which should also help keep that servo’s life span long.
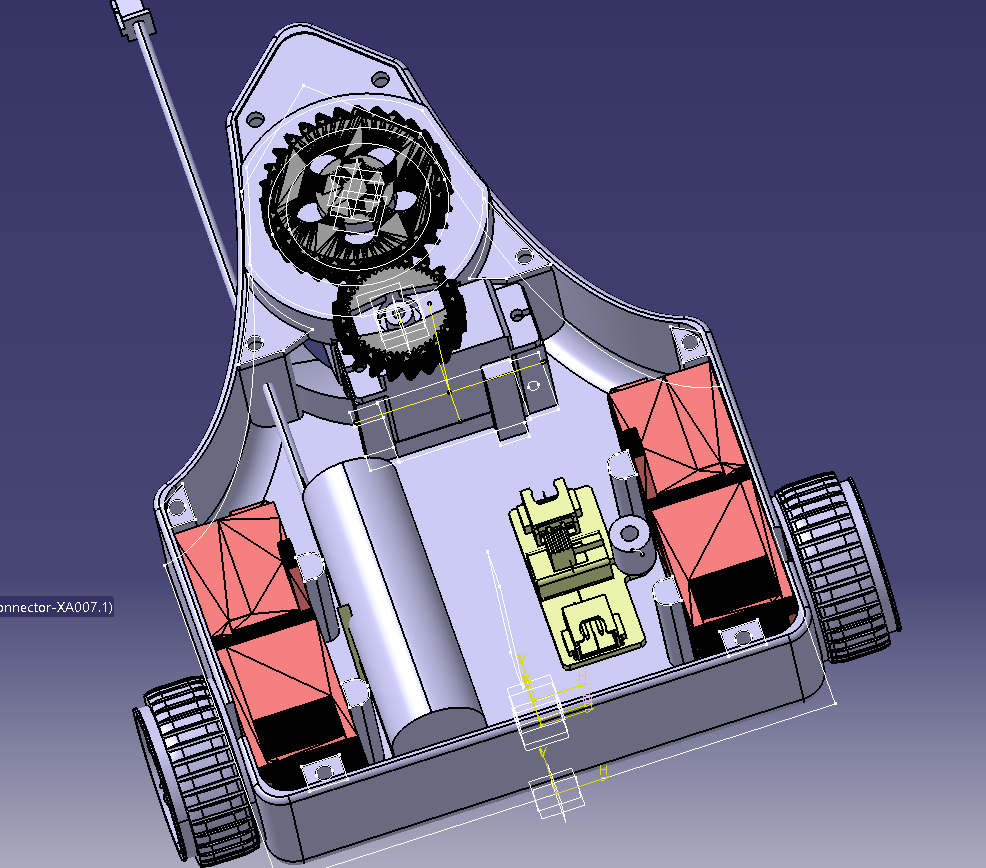
Prototype 1
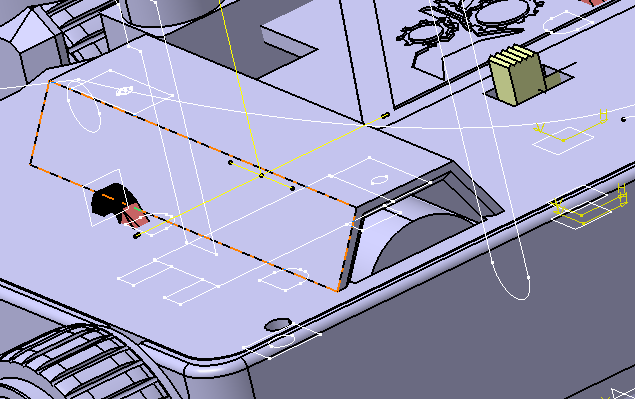
For the first layout, I couldn’t find space for everything neatly inside the body, so I had to turn the battery 90 degrees and sit it on its side. With this, it ended up sticking out the top of the bot, so I added a camel hump to the lid in order to keep the battery in place. Luckily this design didn’t stick around very long.
Mostly the problem was that the servo wire would run into the front wheel, binding it in place, and putting wear on the wire by flexing it tightly. The solution to this was turning the servo 90 degrees. This no longer has a nice symmetry in the bot, however it does solve the wire issue, and gives us space for the battery to be horizontal, removing the battery camel hump.
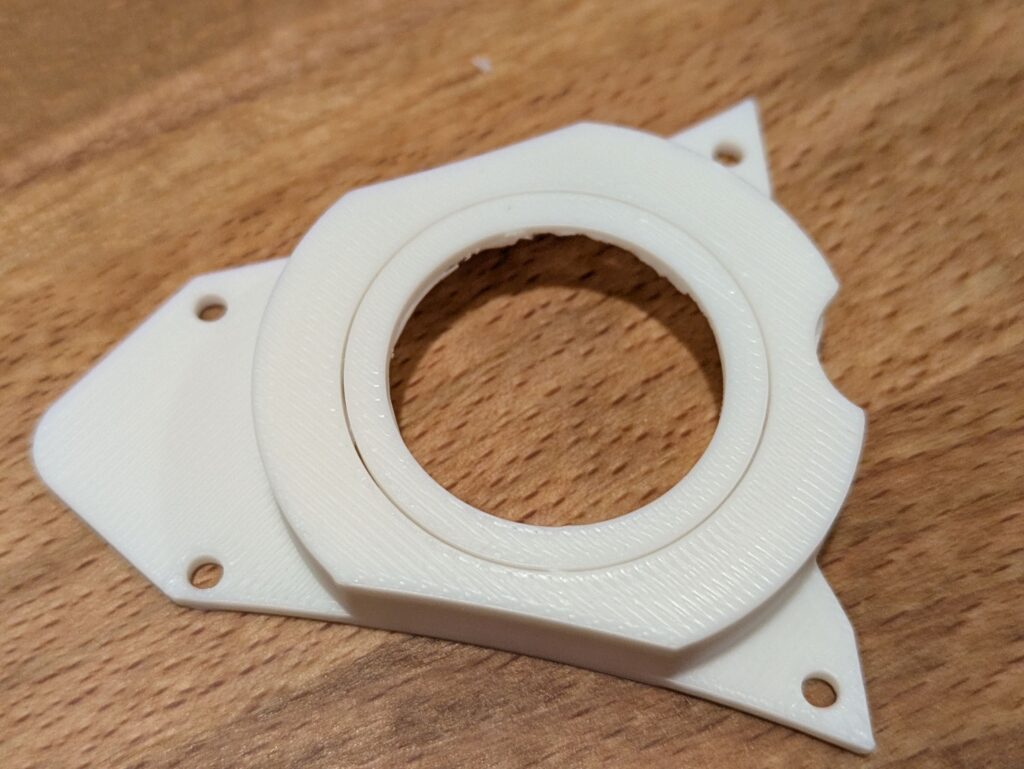
The second fault I ran into was that I had simply modeled the front lid incorrectly. I had accidentally put a small slot in the top where it should be one continuous piece. This simply managed to work for a few demos of the mechanism, but wouldn’t last in the long term since there is no real plastic keeping that wheel in place in this situation.
The third obvious fault is that the motor wires run into the screw mounts for the top lid. This won’t work but these mounts should fit a little further into the corner without running into the wires, so not too hard a fix. Another fault in this motor setup thats less obvious in the picture, I had used a hole for the motor shaft, but designed the motors to be slid in from the top. I changed out the shaft hole for just a full length slot for things to all slide in from above, fixing the worst of it.
But what went right for this first prototype? The steering mechanism worked, and didn’t hit the ends of the motion on the servo. We don’t have any worries about binding the servo up with the steering, and the wheel forks/front wheel system all worked together.
Prototype 2
Now that I have the fixes in place to install the motors, I can find another fault in the motor mount area! The fillets I used to round out the entire bot’s body (interior and exterior) were holding the motors up inside the body, keeping the wheels from contacting the ground. I updated the model in that case to remove the interior fillets underneath the motors.
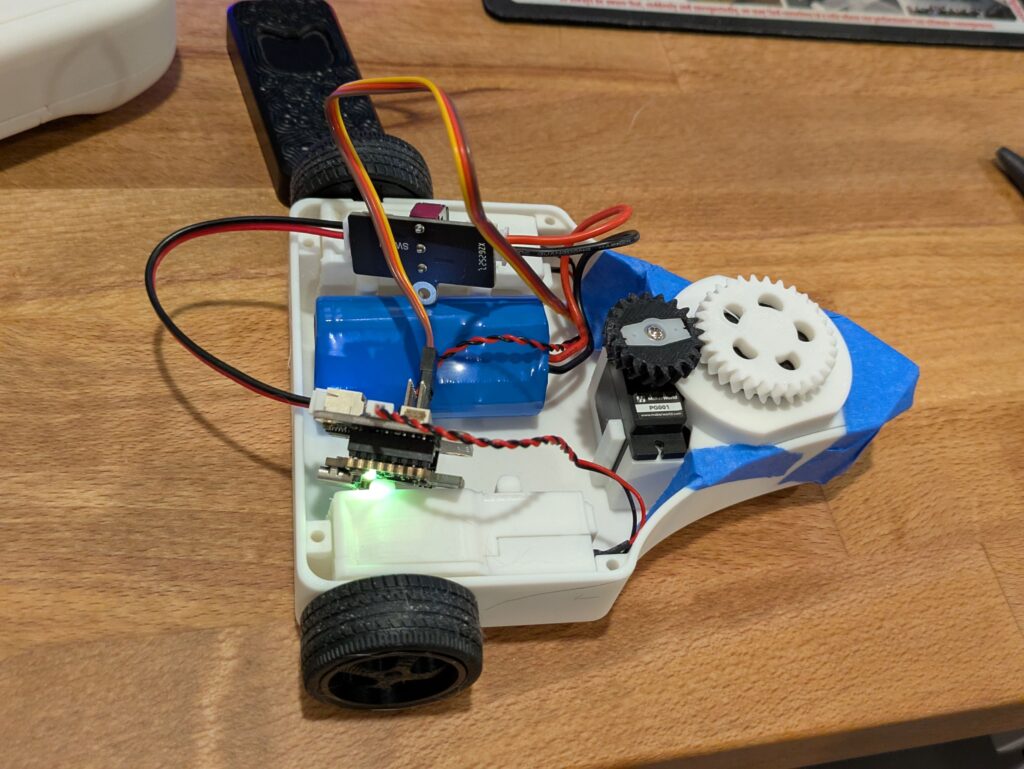
The last few changes were to add the mount for the switch and its cutout, as well as the mount for the receiver. I also had to update the back lid to include a camel hump for the receiver which was too bulky to fit into the body cleanly.
This bot version at least was able to drive around and prove the steering + drive system were working.
Prototypes 3 & 4
These two prototypes weren’t too different. They basically added the mounting for the receiver and power switch to finish out the design. I also proved out the rest of the changes for the motor mounts and driving with these prototypes. Prototype 4 was the final that became the official design for the bot too.
Electrical
The overall electrical system is very simple. Since its using the cyberbrick, its all preselected items, motors plug into the motor spots on the board, and the servo plugs into the first servo header.
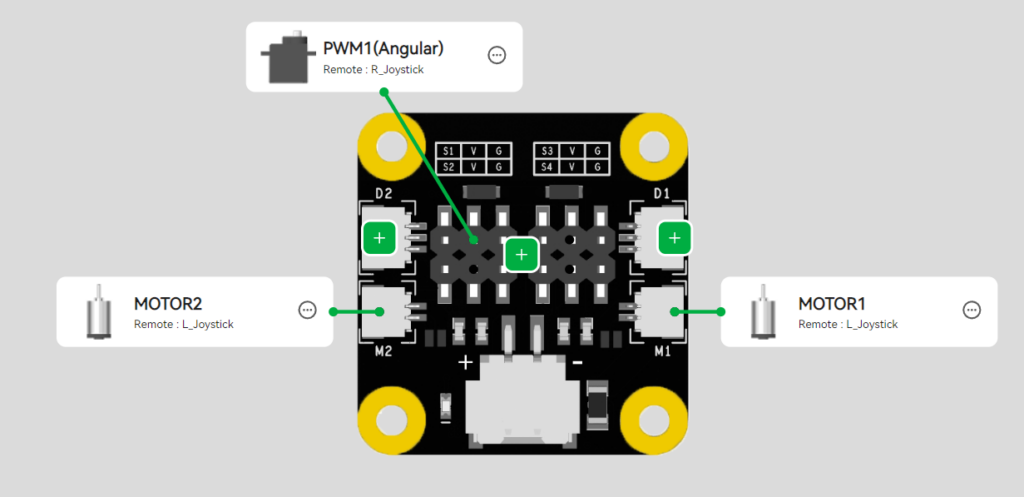
Getting all that into the bot was a bit of a design challenge though. The cyberbrick receiver is…. inefficient…. at its I/O placements, the servo headers come directly off the flat of the board, motors come off different sides from that and from eachother, and the battery off yet another side. So we have our cube shaped board with 4 of its 8 sides covered in wires sticking out. It takes up SPACE in the design, especially in something this small.
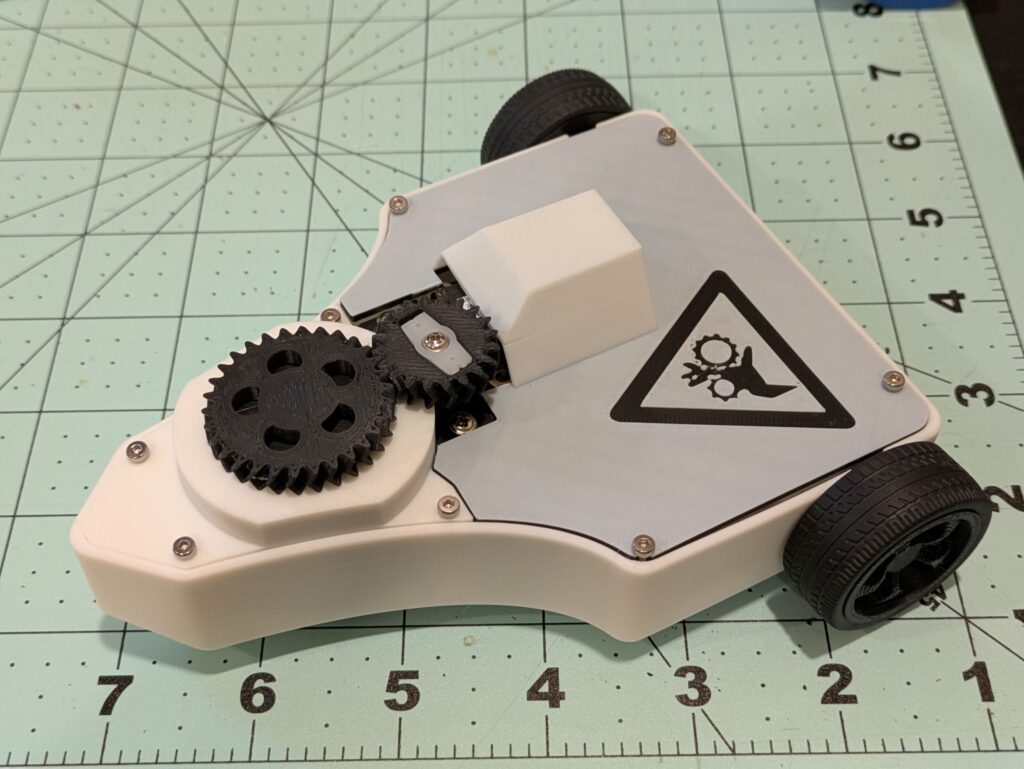
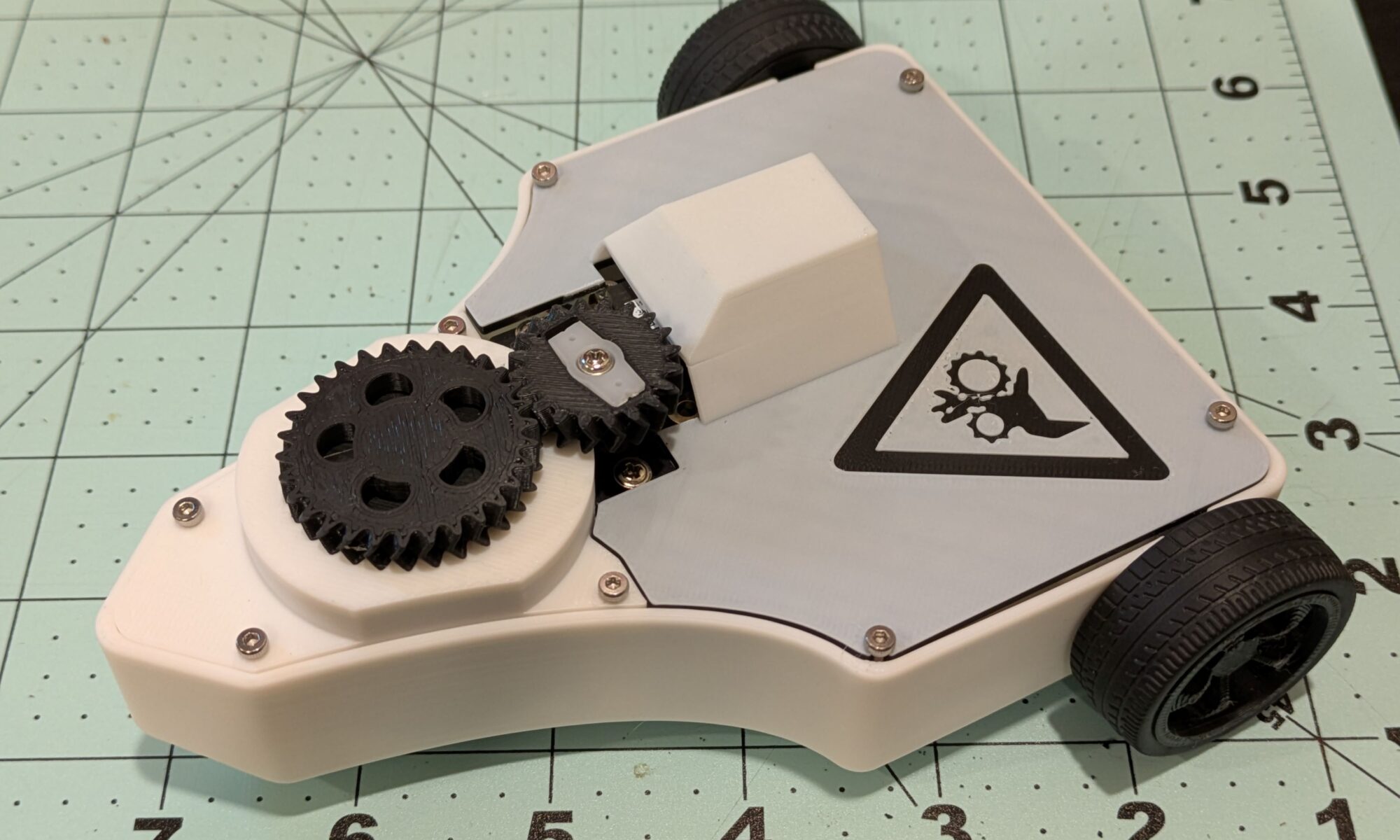
Final Bot
I love the way the bot turned out. I added a little bit of flair on the last part to give it a pinch hazard warning sign on it (hence the name) and a little bit of color without using a lot of material switches. The bot is pretty fun to drive, isn’t too fast but isn’t slow either, and is interesting enough for the cats to chase around a bit.